دسته بندی سایت
محبوب ترین ها
پرفروش ترین ها
پر فروش ترین های فورکیا
 برنامه اکسل متره و برآورد،تهیه صورت وضعیت راه و باند سال1403
برنامه اکسل متره و برآورد،تهیه صورت وضعیت راه و باند سال1403 مجموعه اسکیس معماری از بناهای ایرانی
مجموعه اسکیس معماری از بناهای ایرانی دانلود جزوه الاستیسیته اصغری شریف
دانلود جزوه الاستیسیته اصغری شریف دانلود جزوه اندازه گیری کمیت های مهندسی دانشگاه امیرکبیر
دانلود جزوه اندازه گیری کمیت های مهندسی دانشگاه امیرکبیر حل تمرین کتاب مقاومت مصالح هیبلر Hibbeler - ویرایش هشتم
حل تمرین کتاب مقاومت مصالح هیبلر Hibbeler - ویرایش هشتم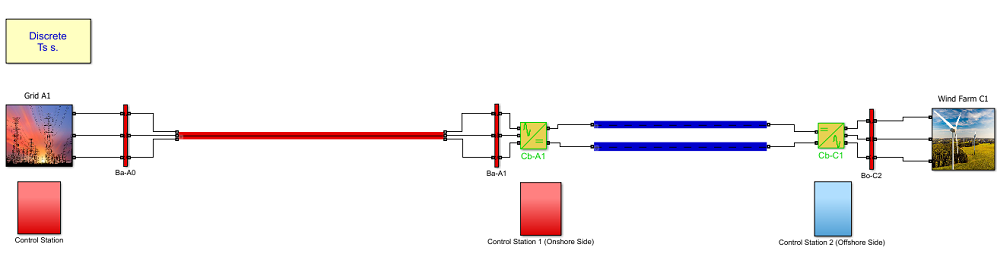 شبیه سازی شبکه HVDC
شبیه سازی شبکه HVDC دانلود جزوه خوردگی دانشگاه امیرکبیر استاد سرابی
دانلود جزوه خوردگی دانشگاه امیرکبیر استاد سرابی دانلود جزوه خواص فیزیکی و مکانیکی پلیمر دانشگاه امیرکبیر استاد حافظی
دانلود جزوه خواص فیزیکی و مکانیکی پلیمر دانشگاه امیرکبیر استاد حافظی دانلود جزوه ترمودینامیک دانشگاه امیرکبیر استاد باقری
دانلود جزوه ترمودینامیک دانشگاه امیرکبیر استاد باقری تحقیق و جزوه ساده < ارزيابي كاركرد و كارايي فيلتر پرس – دستگاه تصفيه > رشته مدیریت با word
تحقیق و جزوه ساده < ارزيابي كاركرد و كارايي فيلتر پرس – دستگاه تصفيه > رشته مدیریت با word مطالعه روشهای تلفیق داده در سیستم ناوبری ترکیبی INS/GNSS
مطالعه روشهای تلفیق داده در سیستم ناوبری ترکیبی INS/GNSS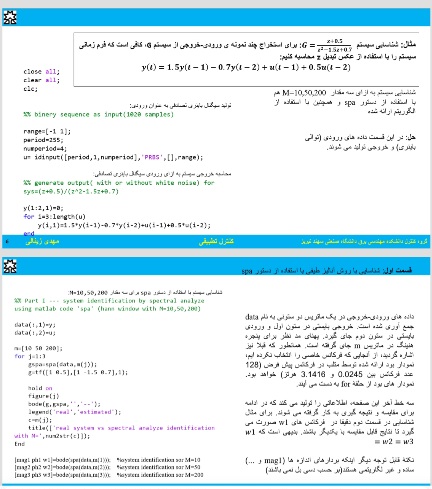 شناسایی سیستم به روش آنالیز طیفی با کد نویسی در متلب و مقایسه آن با کد دستوری spa
شناسایی سیستم به روش آنالیز طیفی با کد نویسی در متلب و مقایسه آن با کد دستوری spa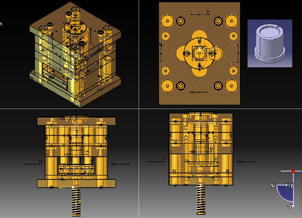 طراحی قالب تزریق پلاستیک چهار کویته در کتیا
طراحی قالب تزریق پلاستیک چهار کویته در کتیا آموزش نحوه تهیه مدار چاپی
آموزش نحوه تهیه مدار چاپی اندیشه اسلامی
اندیشه اسلامی فارسی عمومی دکتر اسماعیل صادقی،ابراهیم ظاهری
فارسی عمومی دکتر اسماعیل صادقی،ابراهیم ظاهری گزارش کار شبیه ساز الکترونیک دیجیتال
گزارش کار شبیه ساز الکترونیک دیجیتال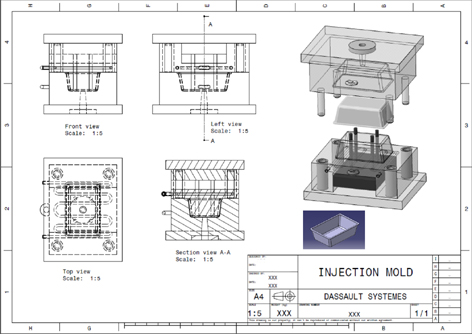 طراحی قالب تزریق ظرف در کتیا
طراحی قالب تزریق ظرف در کتیا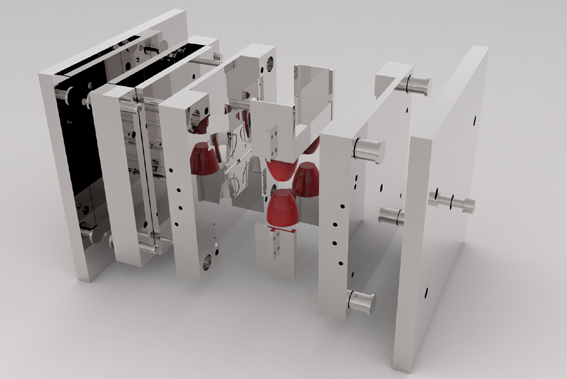 طراحی قالب تزریق فنجان در کتیا
طراحی قالب تزریق فنجان در کتیا کتاب صوتی تبریز مه الود قسمت 3
کتاب صوتی تبریز مه الود قسمت 3 جزوه حل عددی معادلات انتگرال استاد عباس محمدی
جزوه حل عددی معادلات انتگرال استاد عباس محمدی انقلاب اسلامی ایران جمعی از نویسندگان
انقلاب اسلامی ایران جمعی از نویسندگان اندیشه اسلامی
اندیشه اسلامیپر بازدید ترین های فورکیا
 مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته)
مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته) آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو دانلود مجموعه آموزشی پایپینگ ( Piping ) و نقشه خوانی + آموزش سه نرم افزار طراحی و تحلیل لوله کشی صنعتی
دانلود مجموعه آموزشی پایپینگ ( Piping ) و نقشه خوانی + آموزش سه نرم افزار طراحی و تحلیل لوله کشی صنعتی بازگردانی پیامک های حذف شده- ریکاوری پیامک ۱۰۰٪ عملی
بازگردانی پیامک های حذف شده- ریکاوری پیامک ۱۰۰٪ عملی اموزش ویرایش امضا و پکیج برنامه اندروید و کسب درامد از مارکت های اندرویدی
اموزش ویرایش امضا و پکیج برنامه اندروید و کسب درامد از مارکت های اندرویدی کد های آماده html و css جهت یادگیری و طراحی سریع
کد های آماده html و css جهت یادگیری و طراحی سریع آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار
آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار آموزش كامل تعمير لامپ كم مصرف(اختصاصي)
آموزش كامل تعمير لامپ كم مصرف(اختصاصي)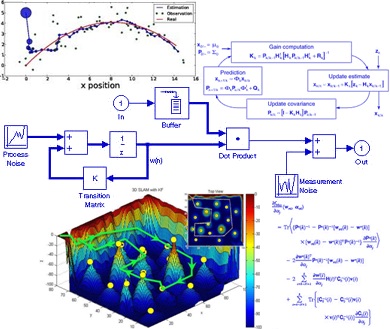 دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت
دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت مدار داخلی واکی تاکی(اموزش ساخت)
مدار داخلی واکی تاکی(اموزش ساخت) کتاب افزایش ممبر کانال تلگرام
کتاب افزایش ممبر کانال تلگرام دانلود100% رایگان نرم افزار تبلیغات در تلگرام + آموزش کامل و فیلم آموزشی
دانلود100% رایگان نرم افزار تبلیغات در تلگرام + آموزش کامل و فیلم آموزشی سوال عملی Excel با جواب
سوال عملی Excel با جواب دانلود مقالات علمی شـــمــــا از سیویلیکا (1500 تومان) Civilica.com
دانلود مقالات علمی شـــمــــا از سیویلیکا (1500 تومان) Civilica.com مجموعه آموزشی میکروکنترلر AVR به همراه 20 پروژه کاربردی به زبان ساده بیسکام
مجموعه آموزشی میکروکنترلر AVR به همراه 20 پروژه کاربردی به زبان ساده بیسکام حل تمارین دینامیک سازه
حل تمارین دینامیک سازه دانلود پاورپوینت سمینار برق قدرت-بررسی خطوط انتقال HVDC
دانلود پاورپوینت سمینار برق قدرت-بررسی خطوط انتقال HVDC گزارش کــــارآموزی کامپیوتر و شبکه های کامپیوتری
گزارش کــــارآموزی کامپیوتر و شبکه های کامپیوتری فایل تحت اکسل طراحی راه پله
فایل تحت اکسل طراحی راه پله دانلود رايگان گاوصندوق اندرويد
دانلود رايگان گاوصندوق اندرويد پروژه نگهداری و تعمیرات، بررسی سیستم نگهداری و تعمیرات (نت) پتروشیمی مبین
پروژه نگهداری و تعمیرات، بررسی سیستم نگهداری و تعمیرات (نت) پتروشیمی مبین EasyDiscuss 4.0.4 J3.x
EasyDiscuss 4.0.4 J3.x جزوه و آموزش کامل تصمیم گیری چند معیاره MADM و MODM همراه با مثال های متعدد
جزوه و آموزش کامل تصمیم گیری چند معیاره MADM و MODM همراه با مثال های متعدد کسب درآمد از طریق ساخت اپلیکیشن اندروید
کسب درآمد از طریق ساخت اپلیکیشن اندروید کاغذ میلیمتری
کاغذ میلیمتری دانلود تحقیق اصول امنيت برنامه های وب
دانلود تحقیق اصول امنيت برنامه های وب جزوه کامل مهندسی علم مواد 14 فایل pdf + نمونه سوالات تستی با جواب
جزوه کامل مهندسی علم مواد 14 فایل pdf + نمونه سوالات تستی با جواببرچسب های مهم
پیوند ها
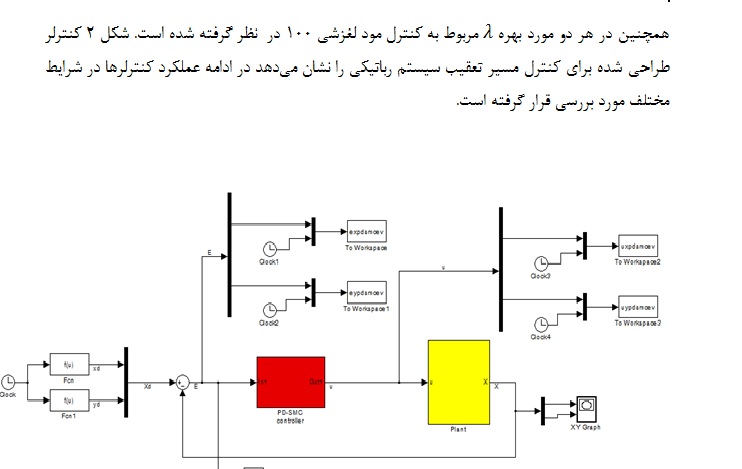
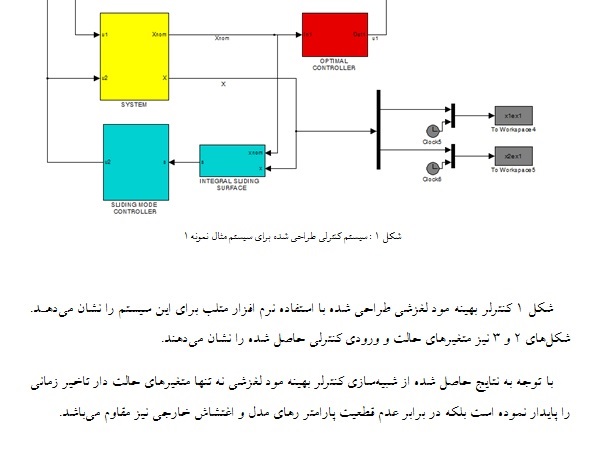
عملکرد خوب تعقیب برای کنترل تعقیب مسیر حرکت یک سیستم رباتیکی بسیار مهم میباشد. در این پژوهش یک قانون کنترلی مدل آزاد به نام مشتقگیر و مود لغزشی ( PD-SMC ) برای کنترل تعقیب مسیر یک سیستم رباتیکی چند درجه آزادی خطی پیشنهاد شده است. قانون کنترلی جدید سادگی و آسانی طراحی کنترلر مشتقگیر تناسبی و مقاوم بودن کنترلر مود لغزشی در برابر عدم قطعیتها و تغییر پارامترها را به طور همزمان دارا میباشد. نتایج شبیهسازی نشان دهنده موثر و مقاوم بودن روش ارائه شده میباشد همچنین نشان داده شده است که روش پیشنهادی قابلیت دستیابی به عملکرد تعقیب بسیار خوب در مقایسه با روش کنترل مشتقگیر تناسبی در حضور عدم قطعیتها و شرایط بارگزاری متغییر را دارا میباشد.
فایل ارائه شده شامل کدهای نوشته شده در نرم افزار متلب ،13 صفحه گزارش در قالب word و تصاویر حاصل شده از متلب می باشد. در شکل ارائه شده تصویری از گزارش آورده شده است. قابل ذکر است این پروژه باسازی یک مقاله معتبر از elsevier در سال 2014 می باشد که نتایج حاصل شده منطبق بر نتایج مقاله مذکور می باشد. pdf مقاله اصلی نیز در فایل خریداری شده موجود می باشد. در صورت نیاز به اطلاعات بیشتر می توانید با شماره 09364773801 از ساعت 18 تا 22 تماس بگیرید.
مبلغ واقعی 20,000 تومان 10% تخفیف مبلغ قابل پرداخت 18,000 تومان
برچسب های مهم
مطالب تصادفی